coder
分布式
共识算法
设想有一台游戏服务器或者一台负责交易撮合的服务器,如果当前的状态只在一台服务器,那么当服务器宕机时,这个时候服务就会不可用,需要重启服务器,重启时还要加载磁盘的状态以恢复内存的状态。为了做高可用,引入了共识算法,简而言之,就是做服务状态的副本,设置N台服务器,但是从外部看来,仍然满足一定的一致性,比较严格的一致性就是线性一致性了。
线性一致性:就是在外部看来,对N台服务器的读写,就像对一台服务器的读写一样。也就是说如果写入了最新值,就不会读到旧的值。
Raft算法
https://blog.csdn.net/z69183787/article/details/112168120
https://ms2008.github.io/2019/12/04/etcd-rumor/
Raft协议分选主(Leader Election)和日志复制(Log Replication)两部分。
选主
Raft为集群中的节点定义了三种状态,分别是Follower,Candidate,Leader。
选主步骤如下:
- Candidate状态的节点会向其他节点发送vote_request,参数需要带上当前节点的term,term表示第几轮选举,每当Candidate发起新一轮的投票请求,term就会加1,带有过期term的消息不会被处理(如heartbeat,vote_request,vote)。
- Follower节点收到vote_request,如果Follower节点检测Leader故障(election timeout时间内没收到heartbeat),且在该term并未投过票,则投票给Candidate。
- 某Candidate收到超过半数的投票,成为Leader。
- Leader节点每隔heartbeat timeout时间就会给其他节点发送心跳。election timeout的时间是150~300毫秒之间的随机值。
日志复制
Raft协议规定只能通过Leader来写,可以从任意节点读。Leader通过日志复制的方式将数据同步到其他节点。Leader需要更新的数据封装在Append Entries消息中,通过heartbeat传输给其他节点。写数据一共分两个阶段:
- 第一阶段:写日志,不提交。Append Entries={在日志中的编号,要更新的数据,不提交}。当Follower收到Append Entries消息后,如果日志不冲突,将Append Entries插入到日志中,回应Leader可写。当Leader收到超过半数的节点回应时,发起第二阶段写。
- 第二阶段:提交。Append Entries={在日志中的编号,提交},Leader回应客户端写成功(数据已不可逆转)。当Follower收到Append Entries消息后,在日志中提交数据。
状态机
Raft节点收到提交的log后,会将其应用到自己的状态机(内存、磁盘等),当收到某条commit的log,记为commit index,当某条log被应用到状态机,记为apply index。如果各个节点的初始状态相同,应用相同的log后,最终各个节点会达到相同的状态。
Aeron Cluster
Aeron Cluster实现了Raft算法,下面是Aeron集群核心方法:
public interface ClusteredService
{
// Start event for the service where the service can perform any initialisation required and load snapshot state.
// 加载快照
void onStart(Cluster cluster, Image snapshotImage);
// A session has been opened for a client to the cluster.
void onSessionOpen(ClientSession session, long timestamp);
// A session has been closed for a client to the cluster.
void onSessionClose(ClientSession session, long timestamp, CloseReason closeReason);
// A message has been received to be processed by a clustered service.
// 这个消息已经集群共识了
void onSessionMessage(...);
// The service should take a snapshot and store its state to the provided archive
// 在此将当前内存状态保存到快照里
void onTakeSnapshot(ExclusivePublication snapshotPublication);
// Notify that the cluster node has changed role.
void onRoleChange(Cluster.Role newRole);
// An election has been successful and a leader has entered a new term.
default void onNewLeadershipTermEvent(...);
}
所以aeron主要有两种文件:
- 一种是快照文件,每次打快照时进行保存一份
- 一种是message log文件
aeron快照
如何打快照?
boolean snapshot = ClusterTool.snapshot(new File(this.cluster.context().clusterDirectoryName()), new PrintStream(System.out));
如何清理快照文件?
RecordingLog recordingLog = new RecordingLog(new File(consensusPath), false);
// Invalidate the last snapshot taken by the cluster so that on restart it can revert to the previous one.
boolean res = recordingLog.invalidateLatestSnapshot();
recordingLog.close();
为什么需要快照?
如果没有快照,每次启动时都会从最初加载log文件,显然不合适,所以需要一个快照,加载快照,然后aeron就会从快照后面一个log开始加载log文件。
message log file
如果log持续增长,也不合适,因为已经有快照了,快照之前的log是可以剪裁掉的。
可以通过下面的代码剪裁log,Purge (detach and delete) segments from the beginning of a recording up to the provided new start position.
AeronArchive.purgeSegments(final long recordingId, final long newStartPosition)
用aeron cluster设计系统
介绍2种方法,一种方法是快照中存储全部状态。如果快照中存不下全部状态,可以将状态存储在数据库中。
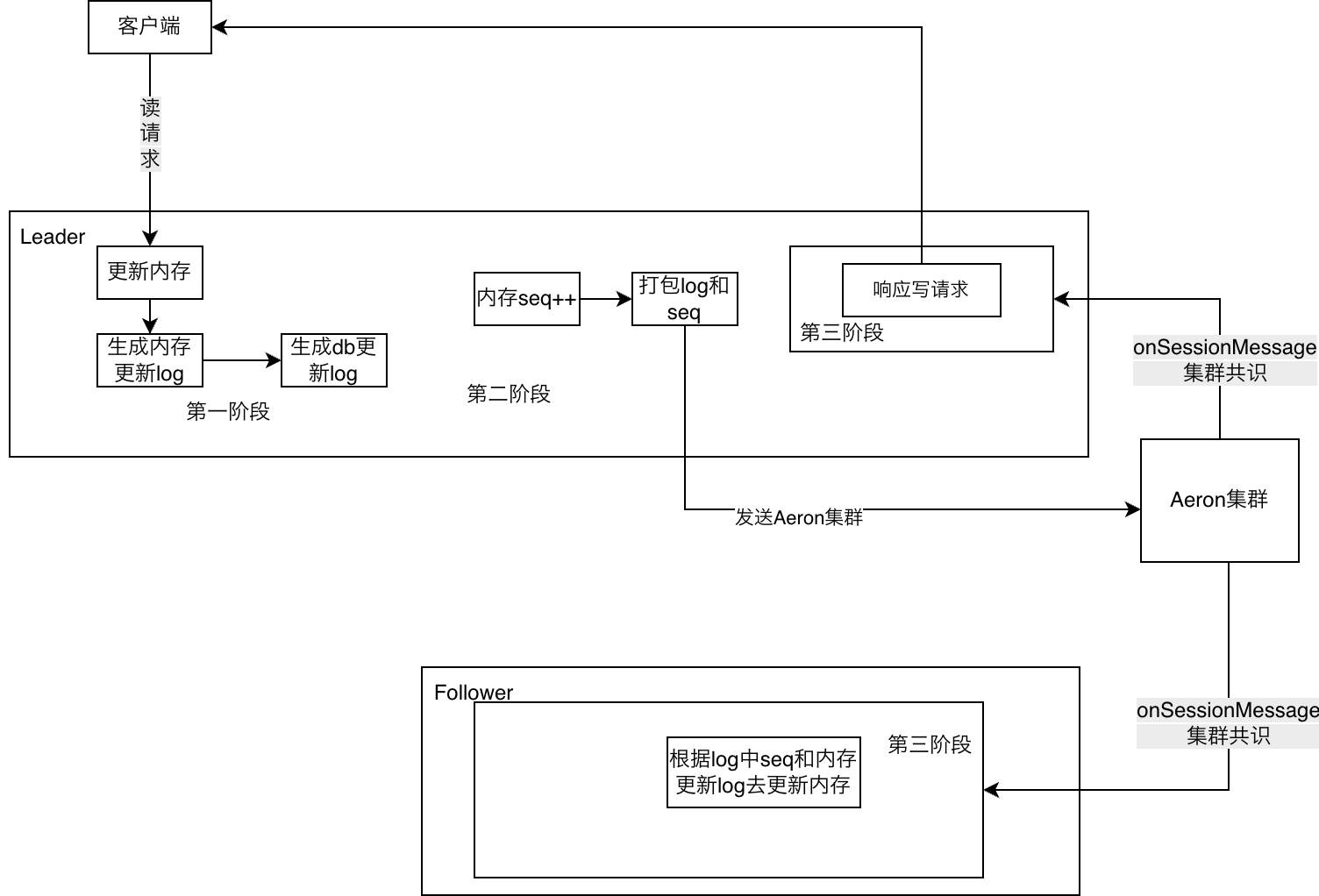
三阶段写
下图是一种基于数据库的设计思路,称为三阶段写
如何处理写
如何处理一致性读
如果对一致性没有要求,则直接读任意节点内存即可,如果对一致性有要求,则需要遵循如下的规则:
- 读取Leader的seq
- 带上seq去请求任意节点,等到状态机至少应用到seq之后,返回内存的状态。
❓为什么要分三阶段,而不是在集群共识后统一更新内存?
因为要在共识前生成db更新log,db更新log作为集群共识消息的一部分,持久化模块会消费集群消息,以事务的方式更新db中的业务、seq以及Aeron的position。在这种模式下,Aeron的快照是空文件(只记录position),真正的快照存储在数据库中。当Aeron集群启动时,找到最新的快照,判定db中持久化的position是否大于等于快照的position,如果是,则加载这个快照,反之,这个快照无效,再找一个更早的快照,直到满足加载条件为止。